HEXA BLOG
ヘキサブログ
いいモノづくり道
エコなリバースフットリグ
今年は、平昌オリンピックやサッカーワールドカップなどスポーツの年になりそうですね。
寒さの折いかがお過ごしでしょうか、おおみや(む)です。
今日はリバースフットリグを作ってみようと思います。
私はあまりリバースフットを好まないのですが、人によってはリバースフットの
粘りけのあるオペレーションを好む人もいます。
どちらも大事ということで、私のリグの上に下駄を履かせるような感じの
即席でエコなリバースフットリグをご紹介しようと思います。
以前、紹介したリグ。
同様の足のリグ。
ポールベクター、足のIK制御兼くるぶしの回転リグ、指先回転リグの簡素なものです。
これに下駄を履かせます。
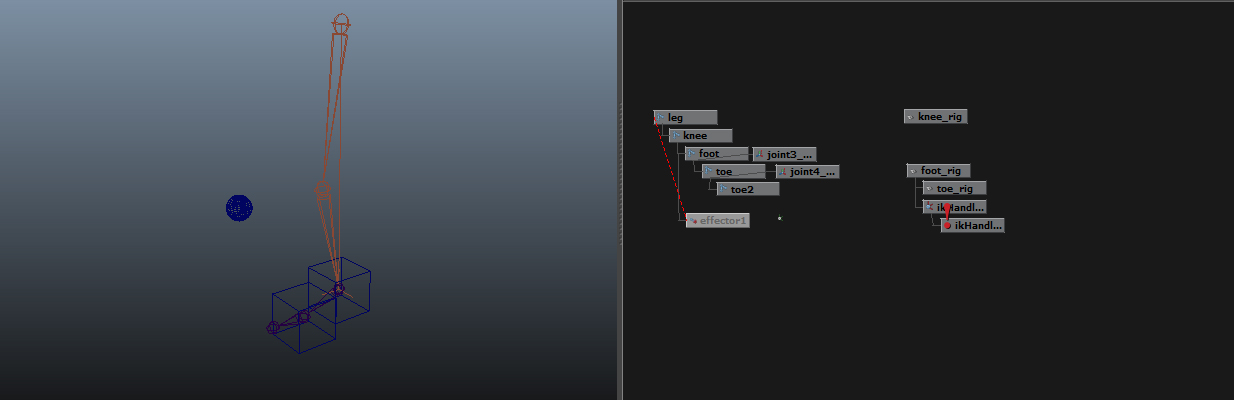
1.toe2ジョイントの位置にrv_foot_rig(ロケーター)、toeジョイントの位置にrv_toe_rig(ロケーター)を回転を合わせて配置し、
2.rv_toe_rigをrv_foot_rigの子供にします。
これで下駄の準備完了。
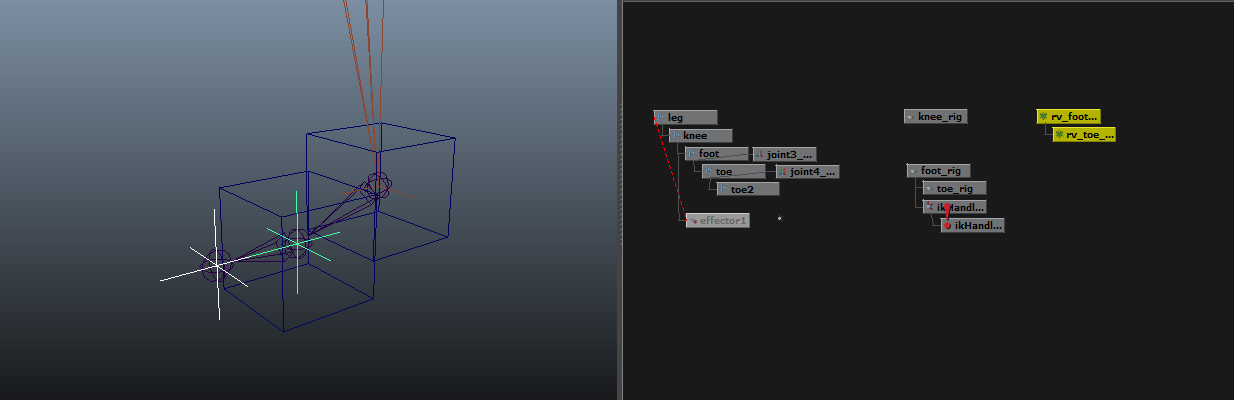
3.rv_foot_rigを主にして、foot_rigにoffsetアリでペアレントコンストレイン。
4.toe_rigのローテートにそれぞれ、エクスプレッションを入れます。
rotateXのエクスプレッションへ
toe_rig.rotateX = rv_toe_rig.rotateX *-1;
rotateYのエクスプレッションへ
toe_rig.rotateY = rv_toe_rig.rotateY *-1;
rotateZのエクスプレッションへ
toe_rig.rotateZ = rv_toe_rig.rotateZ *-1;
ハイパーグラフはこんな感じになります。
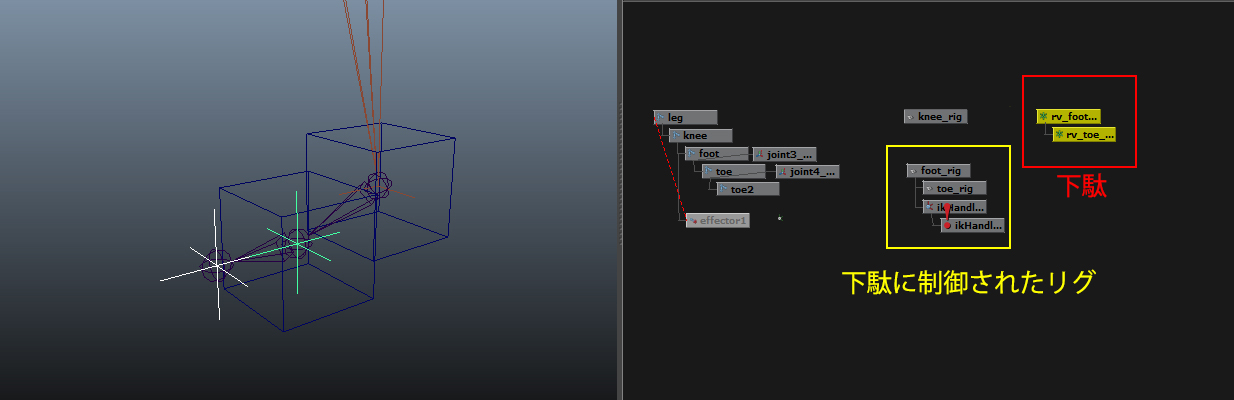
完成です。
パントマイムのクリックやフィックスポイント、メカニズムを知っていれば、リバースフットが
無くとも接地感のある動きは良い感じに作れたりしますが、それはまたの機会に。
それではまた。
CATEGORY
- about ヘキサ (166)
- 部活動 (6)
- CG (18)
- プロジェクトマネジメント (1)
- 研修 (5)
- 美学 (1)
- いいモノづくり道 (232)
- 採用 -お役立ち情報も- (149)
- プログラム (189)
- デザイン (99)
- ゲーム (274)
- 日記 (1,104)
- 書籍紹介 (113)
- その他 (875)
- 就活アドバイス (20)
- ラーメン (3)
- ライフハック (25)
- イベント紹介 (10)
- 料理 (23)
- TIPS (7)
- 怖い話 (3)
- サウンド (5)
- 子育て (1)
- 筋トレ (1)
- 商品紹介 (21)
- アプリ紹介 (31)
- ソフトウェア紹介 (33)
- ガジェット紹介 (12)
- サイト紹介 (10)
- 研究・開発 (34)
- 回路図 (4)
- アナログゲーム (40)
- 交流会 (21)
- 報告会 (3)
- インフラ (25)
- グリとブラン (6)
- カメラ (9)
- クラフト (27)
- 部活 (14)
- 画伯 (15)
- カレー (6)
- 音楽(洋楽) (6)
- 映画・舞台鑑賞 (43)
- 飼育 (5)
- いぬ (8)
- ねこ (19)
NEW BLOG




ARCHIVE
- 2025年
- 2024年
- 2023年
- 2022年
- 2021年
- 2020年
- 2019年
- 2018年
- 2017年
- 2016年
- 2015年
- 2014年
- 2013年
- 2012年
- 2011年
- 2010年
- 2009年
- 2008年
- 2007年