HEXA BLOG
ヘキサブログ
日記
続・3Dプリンタ
こんにちはKayanuma.です。
3Dプリンタ(個人)導入の続きです。
前回は次のブログ当番までに入手できるでしょうか。 で終わったのですが、なんとか入手し家に届きました。
僕が今回購入したのはこちら。
キットなので組み立てなければなりません。
実は届いてから1週間ぐらい箱を開けられませんでした。
注文してから二か月ぐらい経ってしまって(正直)若干興味が薄れてきたのと
封を開けたら最後、確実に何日かの徹夜が待っていると思うと・・。
まあ、これも楽しみの一つなのでコツコツ始めましょうか。
モチベーションに鞭を入れ
最初の一歩を踏み出すとだんだん面白くなってきます。

組み立てマニュアルはPDFになっています。
プリントアウトしてじっくり見ようと思ったのですが、100ページぐらいあったのでやめました。
PCの画面で開いていれば英語のマニュアルもすぐ翻訳できるので楽ですしね。
古いドキュメントは日本語化されているのですが、新しいものはまだ英語版だったのです。
実は気づかず日本語版ドキュメントで作業を進めてしまって、少し戻り作業が出てしまいました。
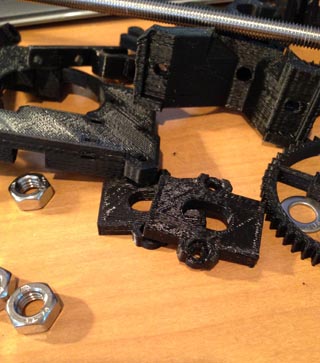
このRepRapの派生形の筐体は長ネジを利用した骨組みと、各部を繋ぐプラスチックパーツでできています。
プラスチックパーツは3Dプリンタで打ち出したものです。パーツが壊れても自分自身で打ち出せるという寸法ですね。
完成品をいきなりプリントできる時代はまだか・・。

長ネジ自身が固定する役割と構造材を兼ねているので精度よく組み立てるにはちょっとコツが必要でした。
長ネジを強い力で挟むとネジ山が潰れてしまうので上手く固定できないのと、
プラスチックを締め付けたときにどれだけ潰れるのか最初は掴めないためです。
ところどころ説明書と食い違う部分もでてきますが、勘で進めていきます。
ちょっとぐらい間違っていてもほとんどの作業はネジを締めるだけなので元に戻せます。
子供のころに絶対に説明書どおりにならないプラモデルと格闘した思い出がよぎりますが、
それよりは全然親切。
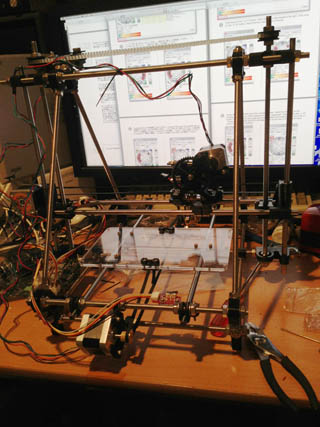
さてなんとか!丸1日ほどかかりましたが形が見えてきました。
一見して華奢で剛性感が無さそうですが、三角形をベースにしている為か意外にしっかりとしています。
押してもそれほどグラグラしません。
スライドする部分にモーターとベルトを取り付けていきます。
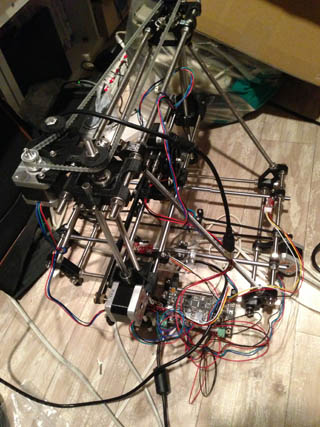
概ね駆動部分が出来てきたので
失敗してもやり直せるだけの気力を溜めてから制御基板を繋いでモーターの動きをテストします。
間違えないようモーターやセンサを繋ぎ、最後に電源コネクタを繋ぎます。
爆発しないかな・・とドキドキしながらコンセントを入れるとパイロットランプが光りました。
USBをパソコンにつなぐとシリアルポートとして認識されました。
テスト用のプログラムでモーターの動きを確認。
おお、動いた。思いのほかスムーズに動いて一安心。
動くのをみるだけでも楽しいです。やったぜ。あれ、でも、なんかおかしい・・動く方向が逆?
むむ、なんということでしょう。どう見直してもX,Yの方向が反転しています。
ベルトの向きをどこかで反転してしまえば!と思いましたが、いつも先走って失敗するので()ここは冷静に。
折れそうなココロを先ほど溜めておいた気力で支えつつ調べてみると、制御基板のファームウエアのアップデートが必要とのこと。
最初から設定されているものとはモーターの回転が逆らしく、そういった部分を記述したコンフィグfileを書き直して、その設定で
コンパイルしなおすようです。
アップデートというよりはこの機械用のカスタマイズですね。
ファームウエアを更新したらちゃんとした方向に動くようになりました。
やれやれ。
ベルトを無理やり反対に着け直さないで良かった・・。
あとはエクストルーダーヘッドとヒーターベッドの試験を残すのみ。
なのですが!ここで次回に続きます。(間に合わなかった!)
CATEGORY
- about ヘキサ (166)
- 部活動 (6)
- CG (18)
- プロジェクトマネジメント (1)
- 研修 (6)
- 美学 (1)
- いいモノづくり道 (227)
- 採用 -お役立ち情報も- (149)
- プログラム (189)
- デザイン (100)
- ゲーム (273)
- 日記 (1,105)
- 書籍紹介 (113)
- その他 (893)
- 就活アドバイス (20)
- ラーメン (4)
- ライフハック (25)
- イベント紹介 (10)
- 料理 (23)
- TIPS (7)
- 怖い話 (3)
- サウンド (6)
- 子育て (1)
- 筋トレ (1)
- NicO (3)
- MakeS (9)
- 商品紹介 (21)
- アプリ紹介 (31)
- ソフトウェア紹介 (33)
- ガジェット紹介 (12)
- サイト紹介 (10)
- 研究・開発 (35)
- 回路図 (4)
- アナログゲーム (40)
- 交流会 (21)
- 報告会 (3)
- インフラ (25)
- グリとブラン (6)
- カメラ (9)
- クラフト (27)
- 部活 (14)
- 画伯 (15)
- カレー (6)
- 音楽(洋楽) (6)
- 映画・舞台鑑賞 (43)
- 飼育 (5)
- いぬ (8)
- ねこ (19)





ARCHIVE
- 2026年
- 2025年
- 2024年
- 2023年
- 2022年
- 2021年
- 2020年
- 2019年
- 2018年
- 2017年
- 2016年
- 2015年
- 2014年
- 2013年
- 2012年
- 2011年
- 2010年
- 2009年
- 2008年
- 2007年